Nastavak priče
U prijašnjem članku opisane su samo osnove izračuna visine i dan je gotov recept, bez pitanja što? zašto? kako? otkud to? Nastavak nudi odgovore na ta pitanja. Nije nužan za razumijevanje prvog članka, već je namijenjen za one koje žele znati više.

Apsolutno nema veze s ovim člankom, ali je za one koji žele znati više. Za pub quiz 🙂
O parametrima
Kod izračuna na gpsvisualizer.com se razlikuju dva bitna parametra: trackpoint distance treshold (slobodno sam to preveo kao horizontalni minimum ) i elevation gain treshold (nazovimo ga vertikalni minimum). O čemu se radi? Najbolje objasniti na primjeru.
Pretpostavimo da je horizontalni minimum postavljen na 5m. Algoritam će uzeti u obzir točke koje su međusobno dužinski udaljene jedna od druge najmanje 5 metara. Znači svaki peti metar duž cijelog traga se uzima u obzir kod računanja. Znači na traci od 1000 točaka koje su udaljene 1 m, uzet će se u obzir tek svaka peta tj njih 200.
Vertikalni minimum je parametar kojim se zadaje minimalna relativna visina od zadnje obračunate točke. Sljedeća točka koja se obračunava mora biti viša ili niža od zadnje obračunate točke minimalno za taj vertikalni minimum.
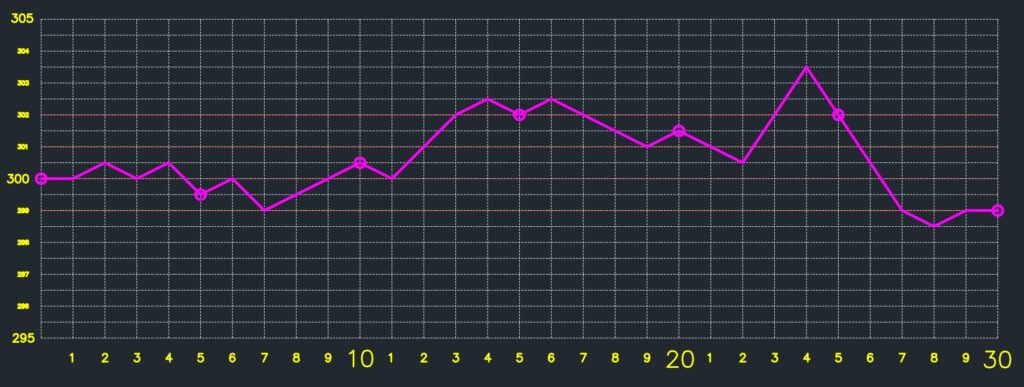
Pretpostavimo da je vertikalni minimum postavljen na 1m. Ako je zadnja obračunata točka bila na 300 mnv, kod izračuna se preskaču sve sljedeće točke dok se ne pojavi točka vrijednosti >= 301 mnv ili <=299 mnv. Sada se postavlja nova vrijednost od 301 nmv odnosno 299 nmv kao referentnta i traži se sljedeća točka koja zadovoljava minimalnu visinsku razliku od +- 1 m. I tako se ponavlja postupak do kraja traga. Zornije prikazano na primjeru ispod.

OK, ali čemu ti parametri služe? Ukratko, da se eliminira horizontalni i vertikalni šum. Šum čine podaci koji su snimnjeni, ali se nisu zaista desili, već su rezultat slabog GPS signala ili drugih čimbenika.
Horizontalni minimum bi trebao pomoći kod filtriranja horizontalnog (tlocrtnog) šuma, koji nastaje kod jako sporog penjanja. No to je ovdje manje bitno, jer je sav horizontalni šum uklonjen, kad se prethodno očisti i uredi trag.
Vertikalni šum: Garminov trag bilježi visinu s točnošću od 20 cm1. Da li je doista toliko točan, teško je reći. U svakom slučaju je pretočan, da mu škodi ! 🙂 Pretpostavimo da hodamo po ravnoj stazi i da bilježi mahanje rukama. Nastane šum, tj ispada da smo se popeli x metara, iako smo hodali po ravnom. Vjerojatno nije toliko osjetljiv, ali zasigurno nastaju slične greške kod snimanja.
Ako postavimo da je vertikalni minimum 1m, vrlo mala kolebanja do 1 m se na taj način ignoriraju kod zbrajanja ukupne ispenjane visine i dobivamo točniji rezultat. Koliko sam upoznat, kod Suunto sata je točnost bilježenja visine u inkrementima od 1m, pa bih u tom slučaju stavio vertikalni minimum 1.5m – 2 m, tek toliko da se eliminiraju mala kolebanja pri mjerenju.
Zašto ne postaviti veći vertikalni minimum? Povećanjem vertikalnog minimuma, konačno izračunata ispenjana visina rapidno pada. Dolazi do prevelikog “peglanja” podataka i tada se osim vertikalnog šuma “peglaju” i stvarni podaci. Kako bi se to izbjeglo, najbolje je koristi kombinaciju horizontalnog i vertikalnog minimuma: npr. vertikalni postavniti na 1 – 2 m, a horizontalni 2m, 5m ili 10 m. Naravno, povećanjem horizontalnog minimuma se smanjuje ukupna kilometraža traga, ali ti nam podaci u ovom slučaju nisu bitni. Točnu kilometražu smo dobili ionako kad smo očistili i uredili trag.
Umjesto zaključka
Sad kad su objašnjeni parametri možemo dobiti odgovor i na konačno pitanje: zašto se izračunati podaci razlikuju od stranice do stranice (Garmin connect, Strava, Wikiloc, Outdooractive i sl.) iako smo učitali jednu te istu traku?
Baš zbog razlike u filtriranju podataka tj različitio postavljenih parametara.
Koja je točna? Ne zna se. Da li ih koristiti ? Na vlastitu odgovornost.
Zašto onda koristiti gpsvisualizer? Ako želimo kontrolirati izračun tj cjepidlačiti, kako vam drago.
- To se može provjeriti otvaranjem datoteke u Notepadu. Gpx nije ništa drugo nego formatirani txt. ↩︎